源码
分治法
缓存
单例模式
el
华为云
数据类型
社区论坛
java项目实战
资源
后断开发
aws
salesforce
java-zookeeper
个人开发
YOLOX
数字IC设计
赋值运算符
taro
cst
控制
2024/4/16 23:23:07
【AI视野·今日Robot 机器人论文速览 第四十八期】Thu, 5 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 5 Oct 2023 Totally 32 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
LanguageMPC: Large Language Models as Decision Makers for Autonomous Driving Authors Hao Sha, Yao Mu, Yuxuan Jiang, Li…
【AI视野·今日Robot 机器人论文速览 第六十四期】Fri, 27 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 27 Oct 2023 Totally 27 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
6-DoF Stability Field via Diffusion Models Authors Takuma Yoneda, Tianchong Jiang, Gregory Shakhnarovich, Matthew R. …
【AI视野·今日Robot 机器人论文速览 第四十九期】Fri, 6 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 6 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚ContactGen, 基于生成模型的抓取手势生成,类人五指手。(from 伊利诺伊大学 香槟) 数据集:GRAB da…
【AI视野·今日Robot 机器人论文速览 第四十五期】Mon, 2 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Mon, 2 Oct 2023 Totally 42 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚PONG, Probabilistic Object Normals for Grasping 用于抓取的概率目标归一化,根据目标表面法向量获取的不确定…

【AI视野·今日Robot 机器人论文速览 第七十期】Thu, 4 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Thu, 4 Jan 2024 Totally 17 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Many-Objective-Optimized Semi-Automated Robotic Disassembly Sequences Authors Takuya Kiyokawa, Kensuke Harada, Weiwei …
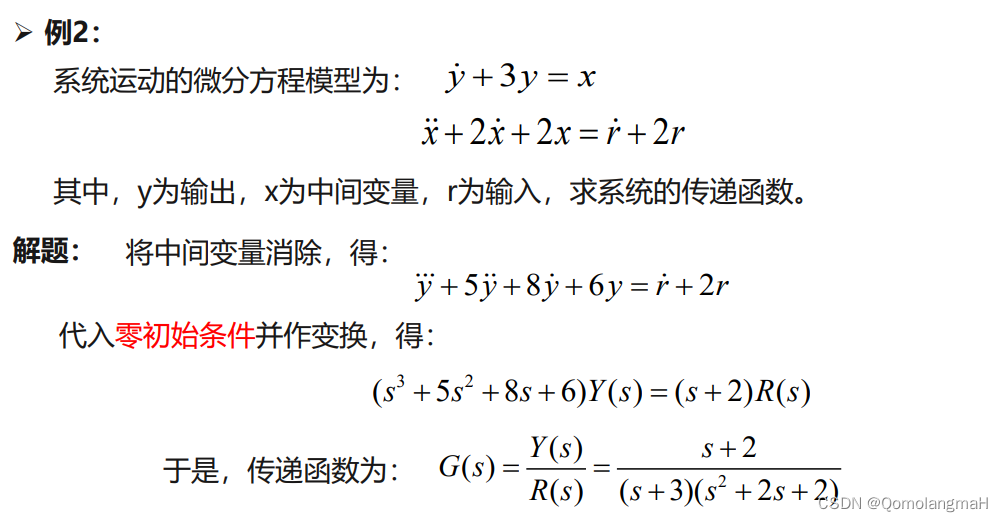
【自动控制原理】数学模型:系统框图及其化简、控制系统传递函数
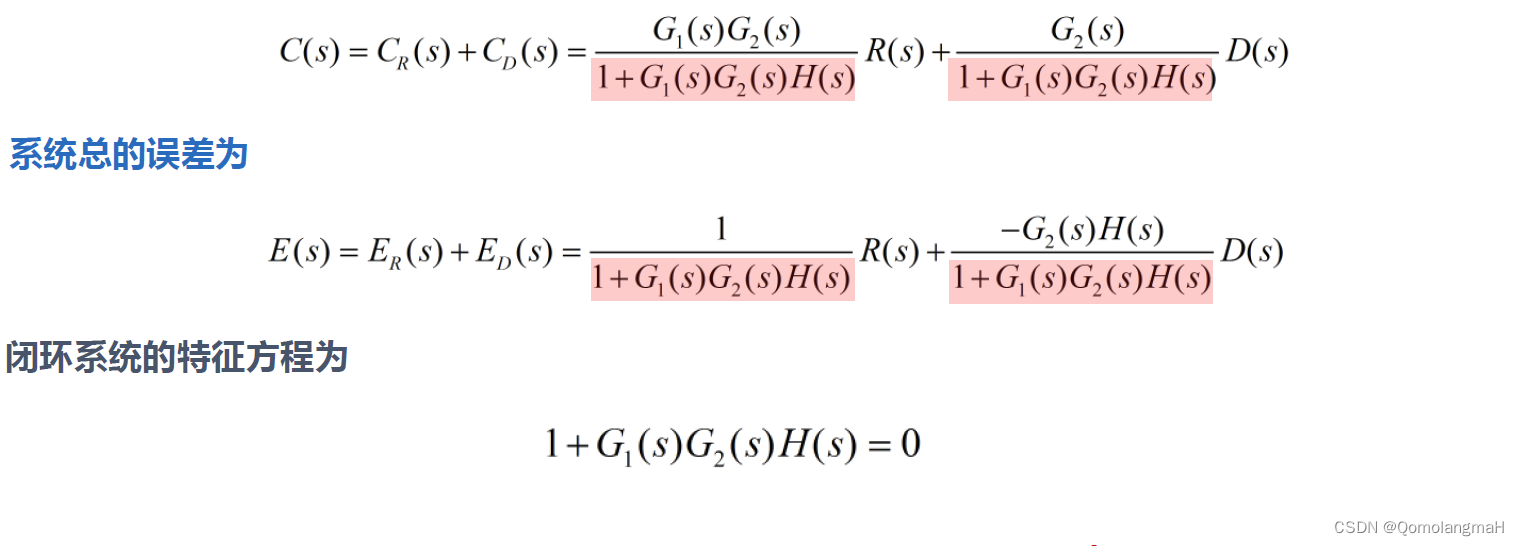
文章目录 第2章 数学模型2.1 控制系统的运动微分方程2.2 拉氏变换和反变换2.3 传递函数2.4 系统框图2.4.1 系统框图2.4.2 系统框图的简化2.4.3 梅森公式2.4.4 例题答案解析——梅森公式 2.5 控制系统传递函数2.5.1 闭环系统的开环传递函数2.5.2 参考输入R(s)作用下的闭环传递函…
1/4车、1/2车、整车悬架PID控制仿真合集
目录 前言
1. 1/4悬架系统
1.1数学模型
1.2仿真分析
2. 1/2悬架系统
2.1数学模型
2.2仿真模型
2.3仿真分析
3. 整车悬架系统
3.1数学模型
3.2仿真分析
参考文献 前言
前面几篇文章介绍了LQR、SkyHook、H2/H∞控制,接下来会继续介绍滑模、反步法、MPC、…

Octave实现位置式PID算法
由于Matlab不让用,只能“你不让爷用,爷就用别的”,选择开源的Octave以及scilab进行相关领域的学习。Octave的代码和Matlab几乎是100%相同的,只有一些专用的包的函数,可能有些还没来得及写,或者有些差异。但…
欧拉公式的证明-泰勒展开法
欧拉公式
欧拉公式在理工科有着广泛的应用和影响。 特别地,当时,,巧妙地将自然对数底数 ,圆周率 ,虚数单位 , 写进一个公式。 证明
由泰勒公式: 即 提取奇偶次项: 即 补充…

Java实现对系统CPU、内存占用率的控制
背景:由于使用的业主的云资源,由于使用率低,会不持续的缩减服务器配置。为了避免后续由于新业务上线,需要更多资源的时候,无法再次获得资源(回收容易,申请难)。
问题:怎…

多任务处理:控制默认行为
控制默认行为 TCP/IP协议的开发者用了大量的时间来考虑协议的默认行为,以满足大部分应用程序的需要。(如果你对此表示怀疑,可以参考RFC1122和1123,它们根据多年的经验对TCP/IP协议的实现的推荐行为进行了详尽的描述。)…

角速度变化时四元数和旋转矩阵微分方程的证明
摘要: 证明了在角速度向量不是常数时,四元数和旋转矩阵微分方程是否依然成立,成立的条件和性质等,最后给出仿真验证。
四元数微分方程的证明 首先列出一些需要用到的四元数公式(基本知识见参考链接[1]) Q…
【AI视野·今日Robot 机器人论文速览 第四十四期】Fri, 29 Sep 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 29 Sep 2023 Totally 38 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
HyperPPO: A scalable method for finding small policies for robotic control Authors Shashank Hegde, Zhehui Huang, Gaur…
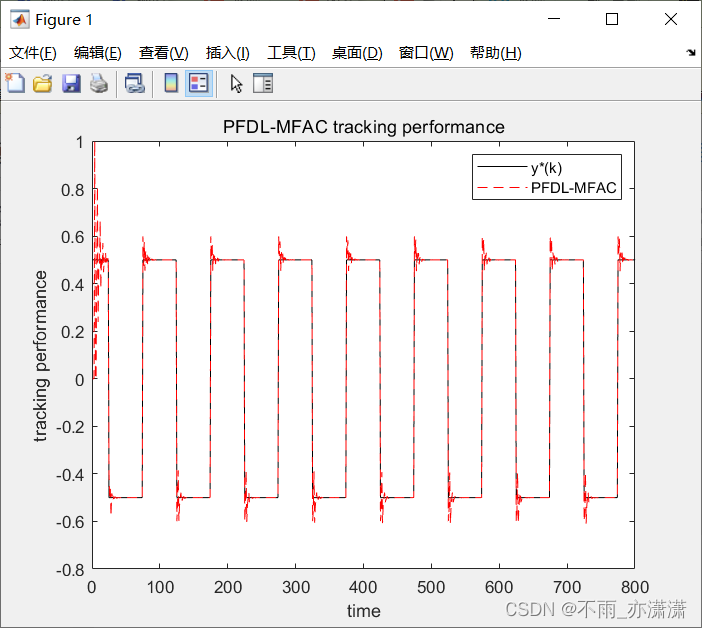
【MFAC】基于偏格式动态线性化的无模型自适应控制(Matlab代码)
例题来源:侯忠生教授的《无模型自适应控制:理论与应用》(2013年科学出版社)。 👉对应书本 4.3 单输入单输出系统(SISO)偏格式动态线性化(PFDL)的无模型自适应控制(MFAC)
上一篇博客介绍了基于紧格式动态线性化的无模型…

几种神经网络整定PID参数原理剖析及simulink案例仿真
目录 前言
1 基于单神经元自适应PID Simulink仿真分析
1.1 原理简介
1.1.1 无监督的Hebb学习
1.1.2 有监督的Delta学习
1.1.3 有监督的Hebb学习
1.1.4 改进的有监督Hebb学习
1.1.5 总结
1.2 simulink仿真分析
1.2.1 将权值作为状态变量仿真分析
1.2.2 利用局部变量…
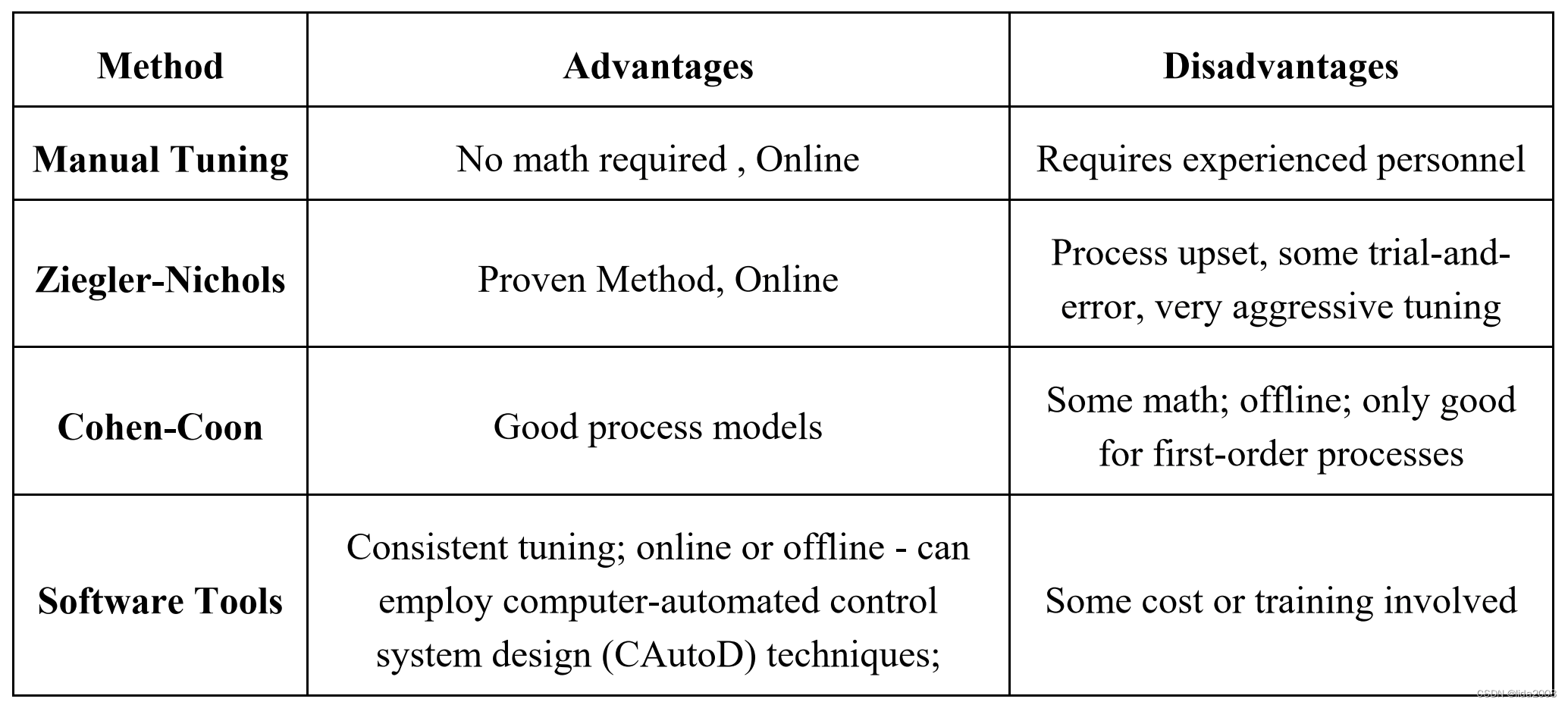
PID控制逻辑基本介绍
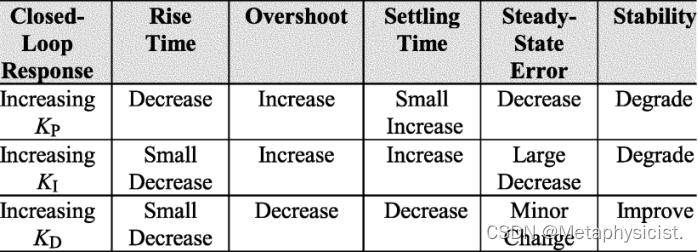
PID控制逻辑基本介绍 1. 源由2. PID基本框图3. PID公式变换4. PID参数释义4.1 比例因子Kp4.2 比例积分Ki4.3 比例微分Kd4.4 Kp/Ki关系4.5 Kp/Kd关系 5. 总结6. 附录6.1 了解 PID 控制,第 1 部分:什么是 PID 控制?6.2 Anti-windup for PID con…
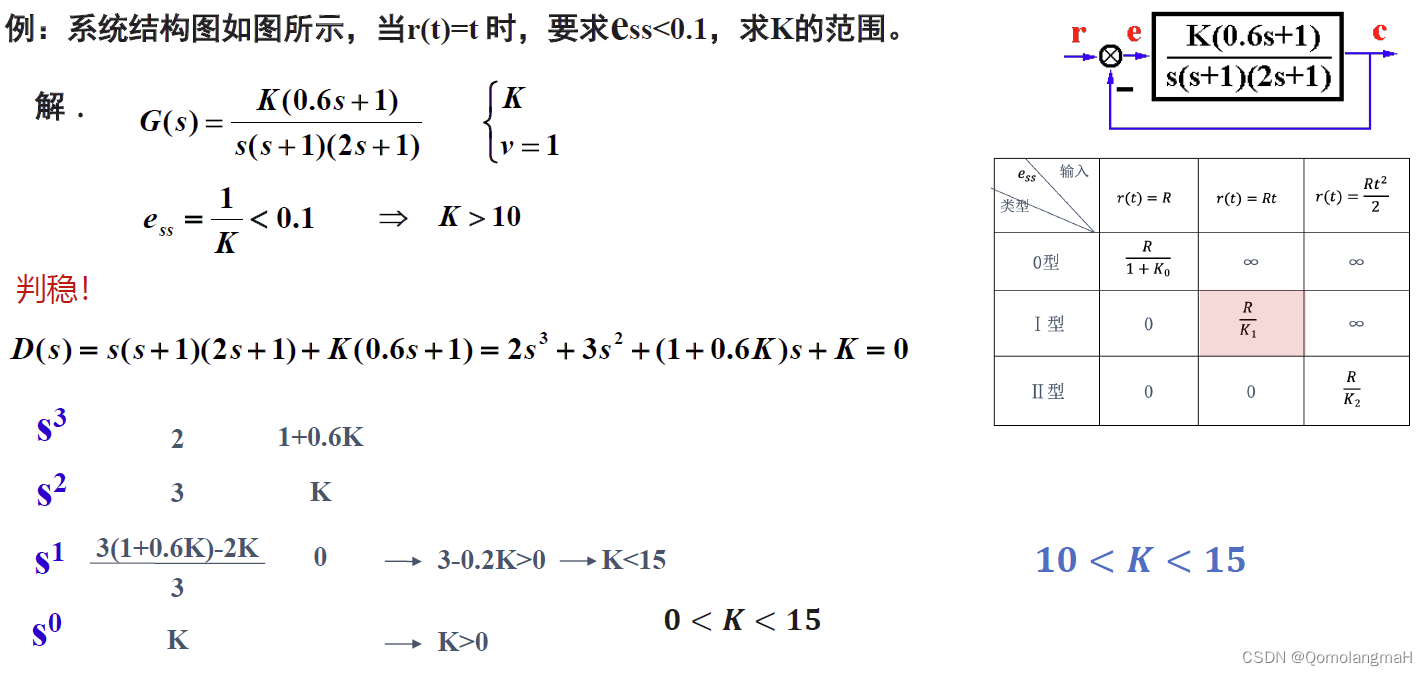
【自动控制原理】时域分析法:稳定性分析(稳)、误差分析和计算(准)
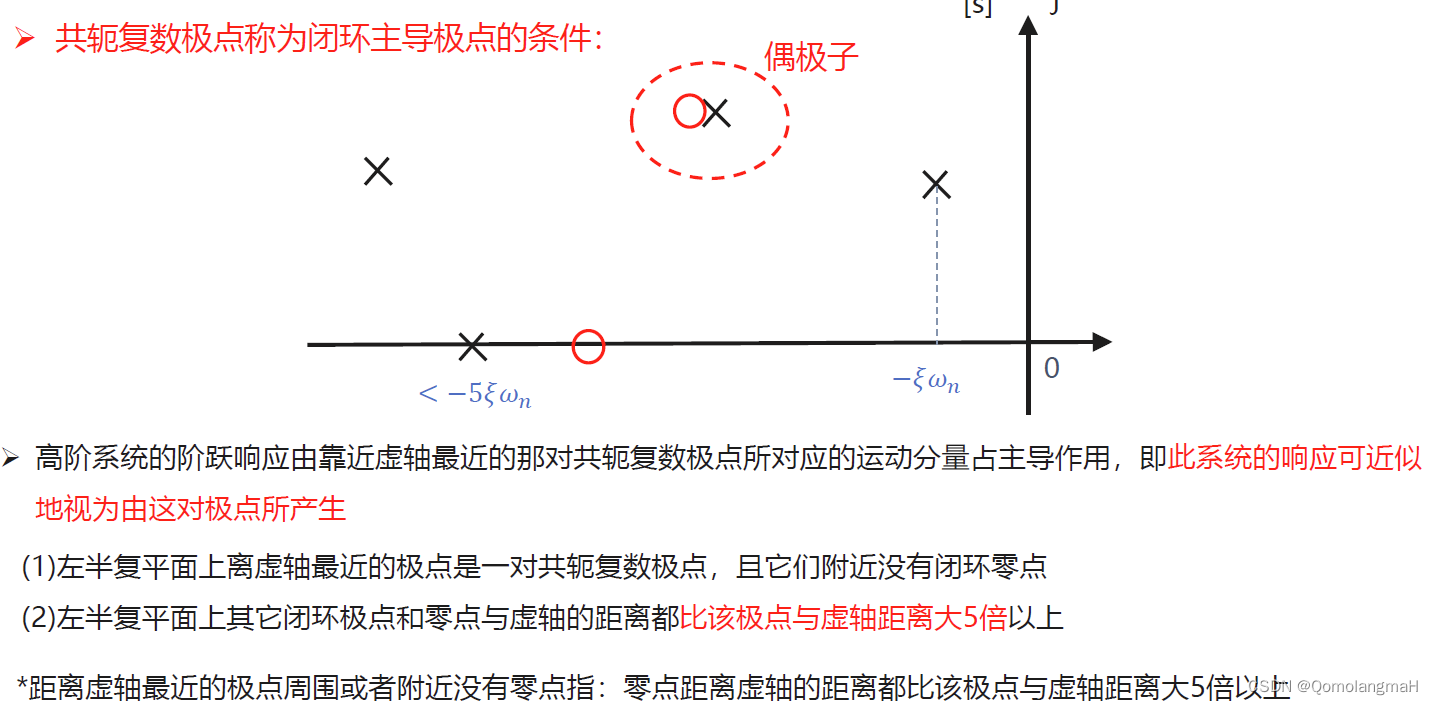
文章目录 第3章 时域分析法3.1 基本概念3.2~4 一阶、二阶、高阶系统的时间响应及动态性能3.6 稳定性分析——稳3.6.1. 稳定性的定义3.6.2 稳定性的条件3.6.3 劳斯稳定判据首列出现0,但该行不全为0首列出现0,且该行全为0 3.5 误差分析和计算——准3.5.1稳…
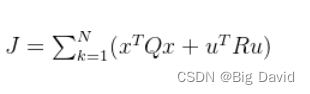
无人驾驶LQR控制算法 c++ 实现
参考博客: (1)LQR的理解与运用 第一期——理解篇 (2)线性二次型调节器(LQR)原理详解 (3)LQR控制基本原理(包括Riccati方程具体推导过程) (4)【基础…
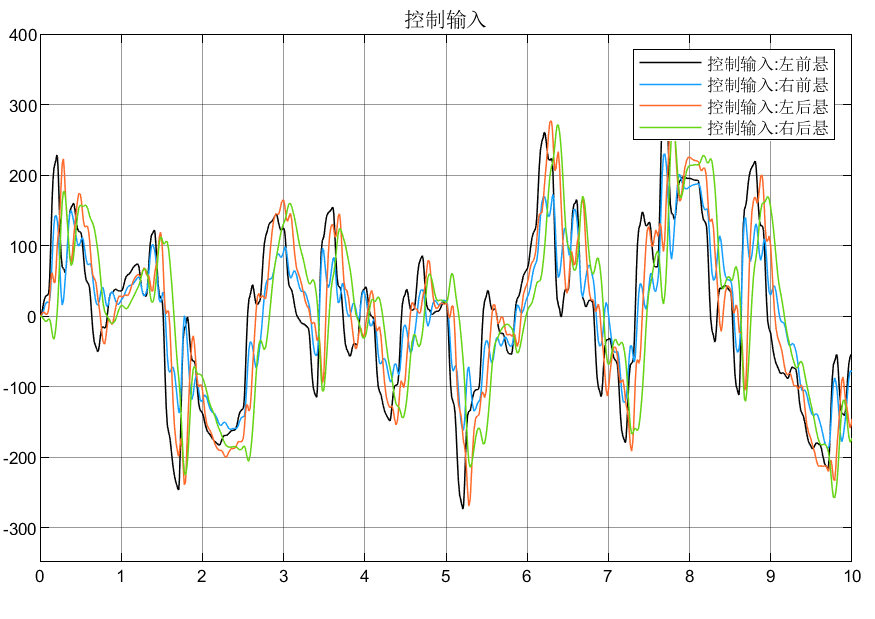
1/4、1/2、整车悬架天棚主动控制仿真分析合集
目录
前言
1. 1/4悬架系统
1.1数学模型
1.2仿真分析
2. 1/2悬架系统
2.1数学模型
2.2仿真分析
3. 整车悬架系统
3.1数学模型
3.2仿真分析
4.总结
参考文献 前言
对于天棚控制相比大家不陌生,它是由美国的Karnopp提出,利用假设的与天棚固连…
在大数据分析中使用闪存将成为可能
一直以来,闪存设备都被用于对存取速度要求高的程序中,现在,它们可以被用于IT各个方面了。
对于中性企业,系统逐渐集成起来,平台的数据中心迅速增长,对性能的要求也逐渐提高。之前,成本是重要的考…
【AI视野·今日Robot 机器人论文速览 第七十一期】Fri, 5 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Fri, 5 Jan 2024 Totally 11 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
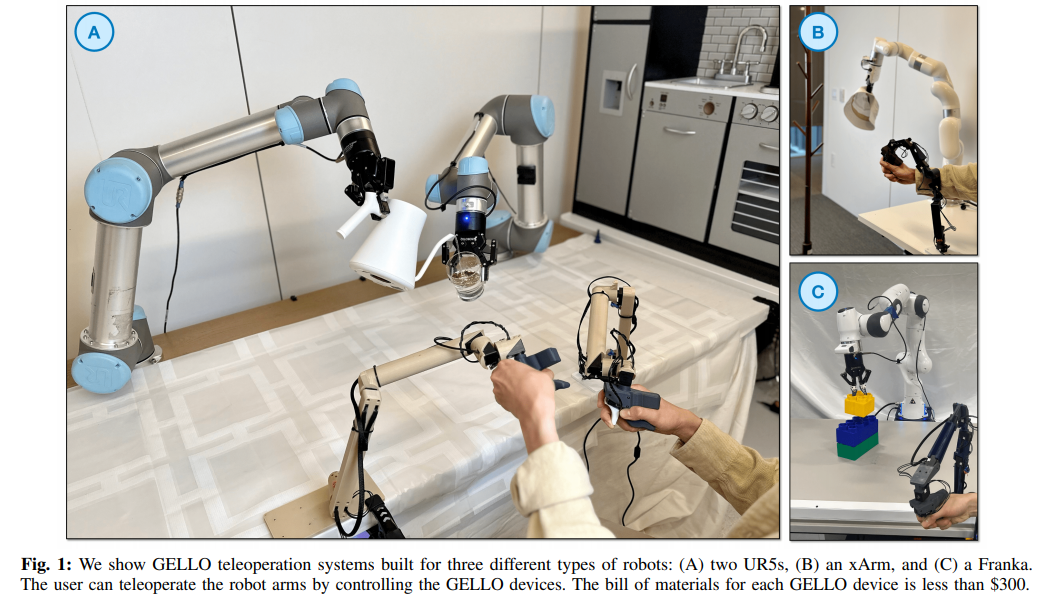
Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives Authors Yuan Bi, Zhongliang Jiang, Felix D…
【AI视野·今日Robot 机器人论文速览 第四十期】Mon, 25 Sep 2023
AI视野今日CS.Robotics 机器人学论文速览 Mon, 25 Sep 2023 Totally 36 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚CloudGripper, 一套云化的机器抓取人数据采集系统,包含了32个机械臂的集群。(from KTH Royal Institute of Te…
端口复用的SPI控制
概要
SPI总线通常为三线构成时钟CLOCK、数据DATA和使能LE,实际工程中经常会遇到功能相同的多个SPI总线器件需要工作在不同的控制状态,如果每个器件依然采用独立的三线SPI,则控制位需要很多,本文给出了通过复用SPI总线简化控制的方法(需要用到额外的CSB片选位)。
通过复…
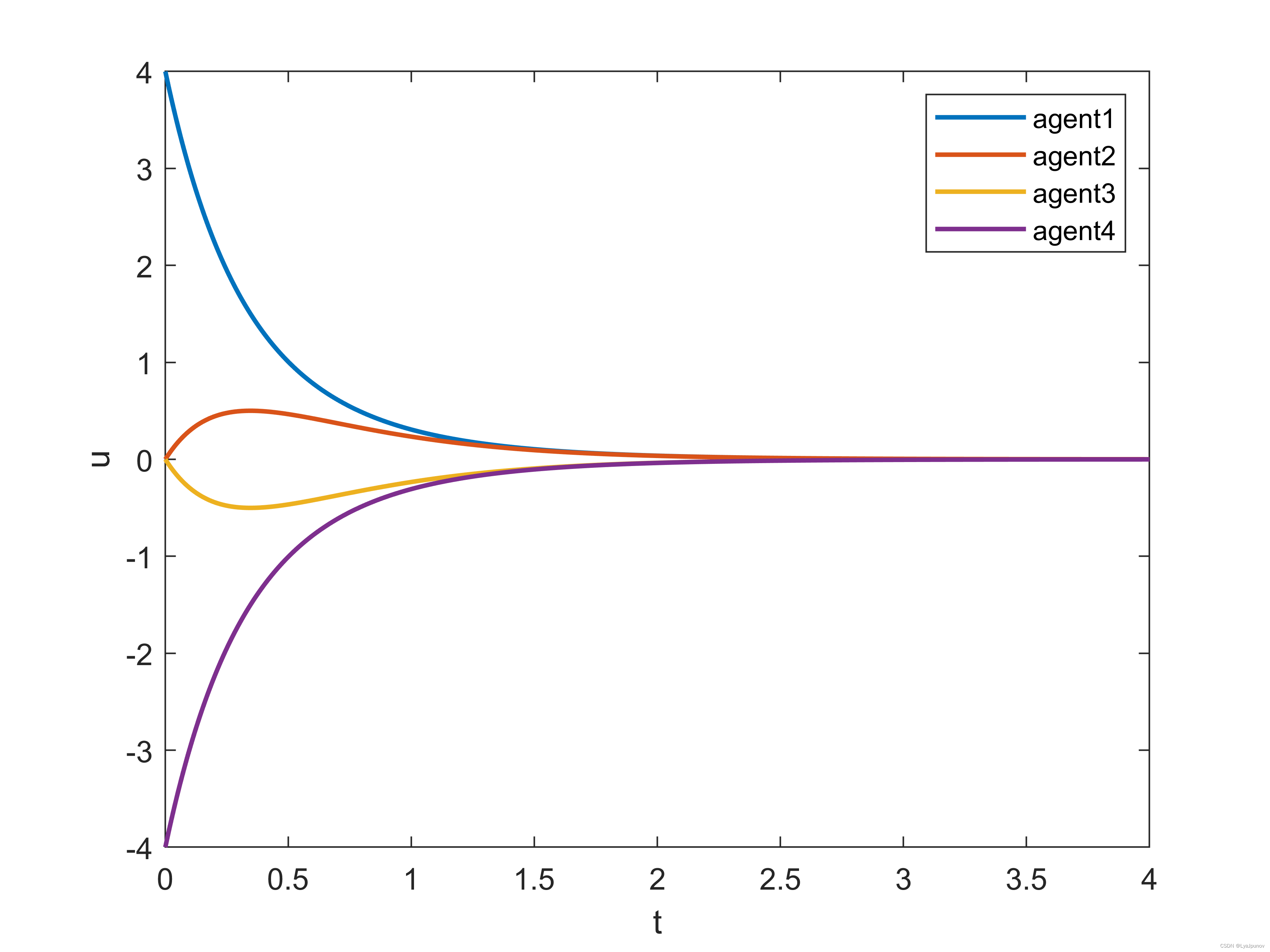
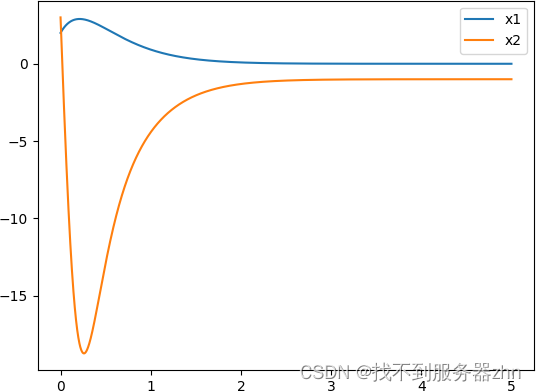
一阶多智能体的平均一致性
数学表达
一阶多智能体的运动学方程可以描述为 x ˙ i ( t ) u i ( t ) , i ∈ { 1 , 2 , 3 , … , N } \dot x_i(t) u_i(t),i\in\{1,2,3,\dots,N\} x˙i(t)ui(t),i∈{1,2,3,…,N} 其中 x i ( t ) x_i(t) xi(t)为状态, u i ( t ) u_i(t) ui(t)为控制量&…
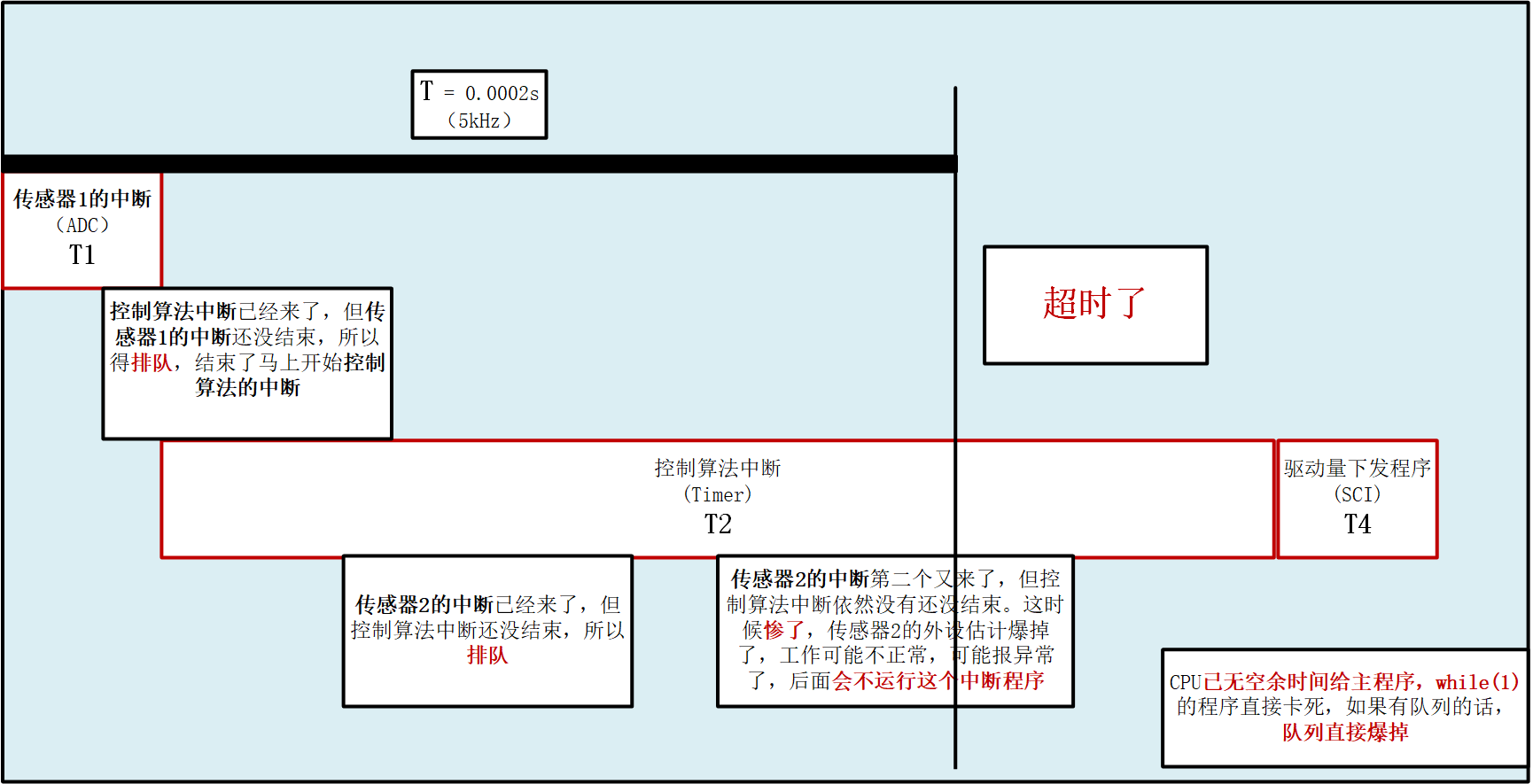
DSP_控制程序框架有感
本文仅代表个人观点,若有不同意见,请评论区讨论或私信留言。 中心思想: 基于DSP的控制程序可分为两个部分,① 对实时性要求高的部分,②对实时性要求不高的部分。 ① 对实时性要求高的程序,建议采用中断处理…
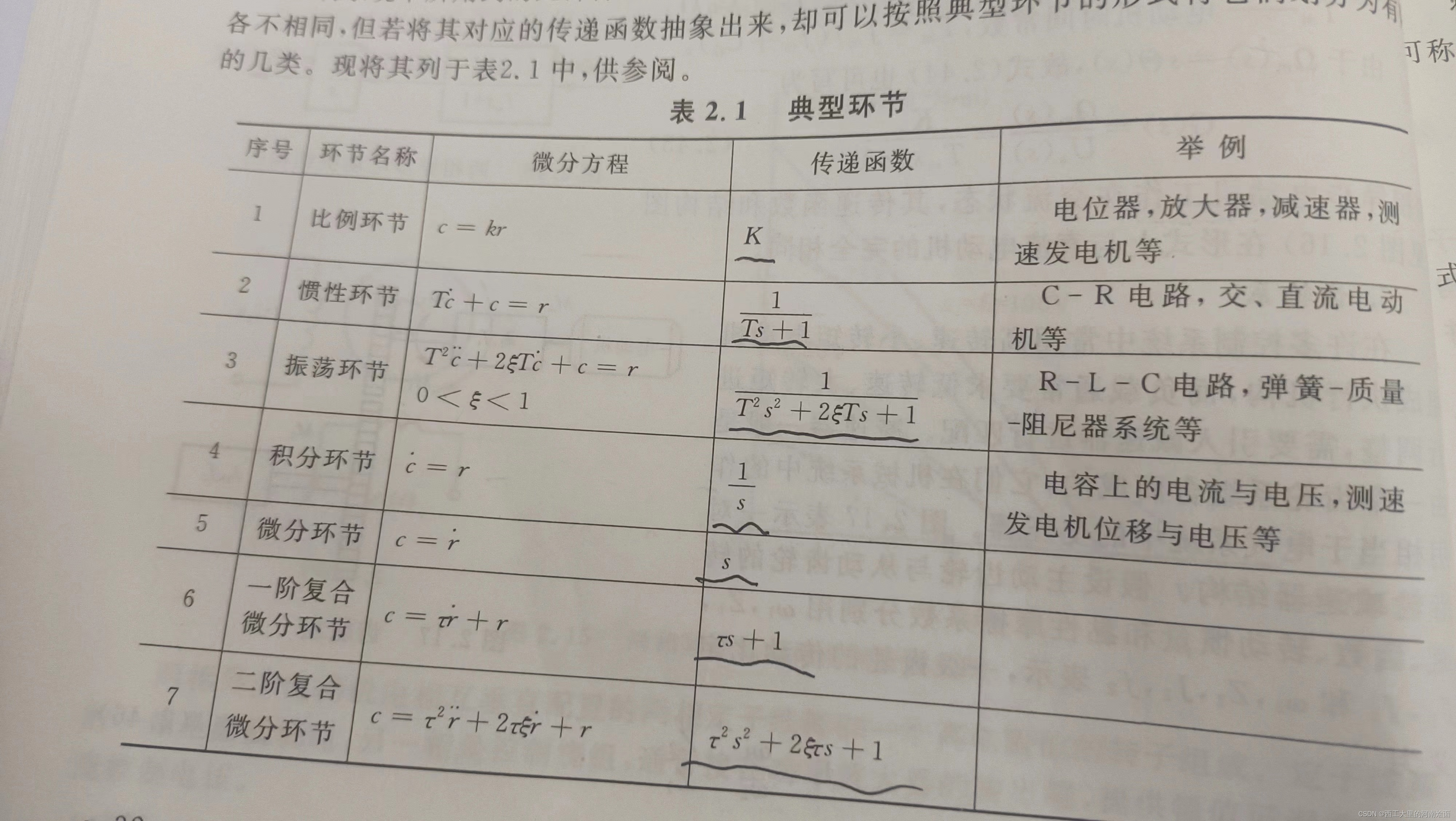
【自动控制原理】数学模型:控制系统的运动微分方程、拉氏变换和反变换、传递函数
文章目录 第2章 数学模型基本概念2.1 控制系统的运动微分方程a. 常微分方程的一般标准形式b. 线性定常系统微分方程的一般标准形式 2.1.1 建立数学模型的一般步骤2.1.2 控制系统微分方程的列写 2.2 拉氏变换和反变换2.2.1 拉氏变换的定义2.2.2 典型函数的拉氏变换2.2.3 拉氏变换…

matlab函数 状态空间系统ss、能控性矩阵ctrb、矩阵的秩rank、能控标准型canon、零极点配置place、系统极点pole等函数(线性定常系统)
matlab函数 能控性矩阵ctrb、能控标准型canon、零极点配置place
第一章,线性定常系统
ss
如果已知线性定常系统的ABCD四个矩阵,可以得到状态空间系统
其他更具体的用法请直接看帮助文档。
用法:ss(A,B,C,D)
假如 可以输入
A [-1.5,-2…
【自动控制原理】时域分析法:一阶、二阶、高阶系统的时间响应及动态性能
文章目录 第3章 时域分析法3.1 基本概念3.1.1 典型输入信号3.1.2 系统动态性能指标 3.2 一阶系统的时间响应及动态性能一阶系统的标准形式(尾1标准型)3.2.1一阶惯性环节的单位阶跃响应3.2.2一阶惯性环节的单位速度响应3.2.3一阶惯性环节的单位脉冲响应3.…
【Simulink】极值搜索控制 Extremum Seeking Control(无模型控制)
1.什么是极值搜索控制?
首先明确一下,对于yf(x),f(a)是函数f(x)的极大值或极小值,则a为函数f(x)的极值点,极大值点与极小值点统称为极值点。
极值搜索,顾名思义,就是找到极小值点或者极大值点…

OpenStack 2015年度总结
到年底了,很多朋友找我聊天,经常问OpenStack企业使用过程中有啥问题。这些问题,目前有啥解决的办法,社区是如何考虑的。
现在的很多信息都在微信,微博里提到。这里就做一个总结。上周和朋友交流,突然发现3年…
【AI视野·今日Robot 机器人论文速览 第五十六期】Tue, 17 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Tue, 17 Oct 2023 Totally 60 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Interactive Task Planning with Language Models Authors Boyi Li, Philipp Wu, Pieter Abbeel, Jitendra Malik交互式机器人…
Linux前后台程序的切换与控制
本文主要介绍在Linux下运行程序,及在前台和后台之间切换与控制的方法。
前台运行程序 通常的运行方法是:./a.out,表示运行当前目录下的可执行程序,并运行在前台。
运行在前台指的是当前终端窗口会暂停接受其他指令,而…

自动驾驶:控制算法概述
自动驾驶:控制算法概述 常见控制算法PID算法LQR算法MPC算法 自动驾驶控制算法横向控制纵向控制 参考文献 常见控制算法
PID算法
PID(Proportional-Integral-Derivative)控制是一种经典的反馈控制算法,通常用于稳定性和响应速度要…
PID应用时要注意的一些点
仅供参考,时间过久,不再修改 用PID好多次了,用来做过智能车,用来做过四轴.PID不难理解,不难应用,网上也有许多介绍PID的帖子文章什么的,有介绍原理公式的,有讲怎么调节的,资料特别多,我就不写那些陈腔滥调了,我写点感觉网上大多数的帖子没涉及到的或是没…
【AI视野·今日Robot 机器人论文速览 第四十三期】Thu, 28 Sep 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 28 Sep 2023 Totally 37 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚****触觉力控学习策略,基于触觉的主动推理与力控用于小孔插入任务。提出了姿态控制与插入控制双策略模型。 (from 东京大学…
四旋翼无人机PID控制Simulink仿真
底部有完整文件地址
整体采用内外环方式对四旋翼的位置和姿态进行控制
Simulink整体模型图
Matlab版本:R2022a 姿态控制效果
滚转角 ϕ \phi ϕ: 俯仰角 θ \theta
【AI视野·今日Robot 机器人论文速览 第四十七期】Wed, 4 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Wed, 4 Oct 2023 Totally 40 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚基于神经网络的多模态触觉感知, classification, position, posture, and force of the grasped object多模态形象的解耦(f…
【AI视野·今日Robot 机器人论文速览 第四十六期】Tue, 3 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Tue, 3 Oct 2023 Totally 76 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Generalized Animal Imitator: Agile Locomotion with Versatile Motion Prior Authors Ruihan Yang, Zhuoqun Chen, Jianhan M…
四旋翼飞行轨迹图绘制
使用Matlab绘制四旋翼三维轨迹跟踪曲线 目录 一、圆形二、螺旋线三、八字线一、圆形
代码:
clear
figure
t = 0:0.001:2*pi;
x = sin(t);
y = cos(t);
z = 5;
plot3(x,y,z*ones
【OpenCV】视频读入、播放控制和写入
刚才随便写了下关于OpenCV中的关于对视频进行操作的几个小程序,其实**对视频的操作也是OpenCV的一个重要方面,视频可以看作是图像序列,每一帧都是一个单一的图片,采用循环处理每一帧的方式,也就可以对视频进行处理。**…
四旋翼飞行器建模(二)
四旋翼飞行器的位置运动学和位置动力学建模方法,以及转速的求解方法。 目录 一、坐标变换:二、位置运动学:三、位置动力学:四、控制量计算刚体的任何方向都可以通过三个基本欧拉角的组合来实现,旋转矩阵由以下等式给出:
一、坐标变换:
惯性坐标系: E G {E_G} E
【MFAC】基于紧格式动态线性化的无模型自适应控制(Matlab代码)
例题来源:侯忠生教授的《无模型自适应控制:理论与应用》(2013年科学出版社)。 👉对应书本 4.2 单输入单输出系统(SISO)紧格式动态线性化(CFDL)的无模型自适应控制(MFAC)
例题4.1
题目要求 matlab代码
clc; clear al…
Lead-Lag控制器形式
对于Lead-Lag(超前—滞后),有的地方叫做控制器 Controller,有的地方叫补偿器 Compensator,有的地方叫滤波器 Filter,都是一个东西。
Lead-Lag也有几种不同的形式,一种是 G c ( s ) 1 a T s 1…
【AI视野·今日Robot 机器人论文速览 第七十九期】Thu, 18 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Thu, 18 Jan 2024 Totally 43 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
CognitiveDog: Large Multimodal Model Based System to Translate Vision and Language into Action of Quadruped Robot Aut…
自动控制原理备考-1题-传递函数
首先致敬西北工业大学自动控制原理的无冕之王张科老师。
期末考试,先下手为强,后下手遭殃。今天我们就开始一起针对期末考试有关题型一一梳理,突破解决。
给你一个系统结构图,让你求R(s)和N(s)同时作用下的C(s)。基本…
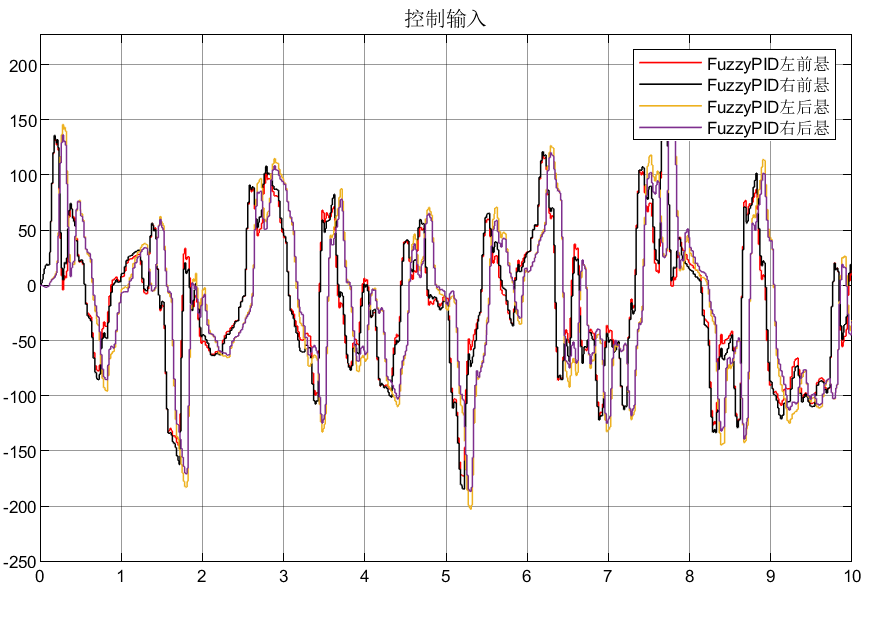
1/4车、1/2车、整车悬架模糊PID控制仿真合集
目录
前言
1. 1/4悬架系统
1.1数学模型
1.2仿真分析
2. 1/2悬架系统
2.1数学模型
2.2仿真模型
2.3仿真分析
3. 整车悬架系统
3.1数学模型
3.2仿真分析
4.总结 前言
前面几篇文章介绍了LQR、SkyHook、H2/H∞、PID控制,接下来会继续介绍滑模、反步法、M…
【AI视野·今日Robot 机器人论文速览 第七十六期】Fri, 12 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Fri, 12 Jan 2024 Totally 12 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Topology-Driven Parallel Trajectory Optimization in Dynamic Environments Authors Oscar de Groot, Laura Ferranti, Dari…